Chapter 1
Geometry and Trigonometry
Geometry is mostly a qualitative subject that instructs in how to construct shapes: circles, triangles, lines, and then in higher dimensions, planes, spheres, conics and polyhedra, using concepts of distance and angles. Trigonometry is mostly a quantitative subject that allows one to enumerate lengths of lines and angles between lines. Coordinate systems permit geometry to be understood, quantified and algebraically manipulated. Combining these ideas we can study transformations, such as translation, reflection, and rotation which are also a subject matter of geometry.
Unless stated otherwise, we will always be considering only Euclidean geometry. In this document, we mostly use rectangular coordinates (also called Cartesian coordinates). There are other coordinate systems that are sometimes easier to use for certain problems. The most common alternative is ${\bf \text{polar coordinates}},$ where each point in a plane is described with two numbers, its angle from the positive abscissa ($x$-axis) and its distance from an origin.
1.1 Points Tuples and VectorsNext
In the Cartesian coordinate system, a 2 dimensional (2d) point denotes a position within the plane. Most often the plane is defined as $y$ the vertical direction and $x$ the horizontal direction. The point, given by an $x$ and $y$ number denotes the number of units away from an origin in the horizontal and vertical directions. The point is written as a pair of values with the $x$ value first, a comma, and then the $y$ value. Frequently these values are enclosed in parentheses or brackets. When extended into 3 dimensions, a third value, $z$, is added to the list and we have $(x,y,z)$ denoting a position in the three dimensional directions.
A ${\bf \color{red} tuple}$ is a finite ordered list of elements. An $n$-tuple is just a finite ordered list of $n$ elements. A purely algebraic ${\bf \color{red} vector}$ is a tuple. So for example, a 3-tuple in $\mathbb{R}^{3}$ can be denoted as $(a,b,c)$ with $a,b,c\in \mathbb{R}.$ For a third grade level interpretation, we just said that a tuple of three numbers make a set in 3-space, also called 3-dimensions, and that those three numbers can be written as variables $a,b,c$ and that they are in the set $\mathbb{R}$ which is the set of real numbers. Tuples are commonly written in parenthesis, with commas between the numbers. Adding tuples together is done by elements. So, $$(x_{1},\,x_{2},\,x_{3})+(y_{1},\,y_{2},\,y_{3})=(x_{1}+y_{1},\,x_{2}+y_{2},\,,x_{3}+y_{3}).$$ Likewise, if we multiply a ${\bf \color{red} scalar}$ times a tuple, it is done by multiplying the scalar times each element of the tuple. In $\mathbb{R}^{2}$ a point is a 2-tuple set.
Often, we will write the tuple as a column matrix, omitting the commas. When that occurs, it is ever more clear that we mean for that tuple to be a $\bf \color{red} vector.$ Computer software may need to distinguish between a point, a vector, a one row matrix, and a one column matrix. To this date, there is not a standard convention for how that is done.
A closely related, but not identical use of the word "vector'' is as a directional line segment, usually with an arrow on one end to verify the direction. The arrow object has both length, known as $\bf \color{red} magnitude$, and direction. One could have a tuple that contained as one element, the length and as another element, an angle for direction, but that is not the convention. Instead, the convention is to list elements of the tuple exactly like the purely algebraic vector. The length is determined by the distance formula and the direction is given by the values in the tuple. Both of these ideas will be covered later and in much detail. The vector, as an oriented line segment in the plane or in space, does not have a designated starting point. Consequently, it can be positioned as needed without changing its properties. A point is a position in space while a vector is a direction in space, designated as from the origin to its tuple values. Once designated, the vector can be translated to any starting point and its magnitude and direction will not change.
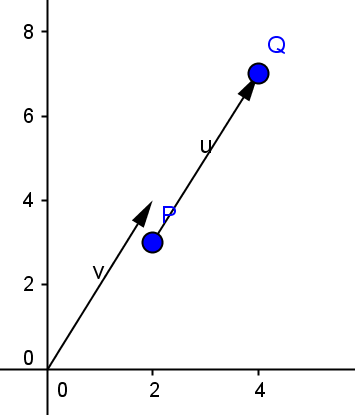
Suppose there exist two points with paired elements, $P=(2,3)$ and $Q=(4,7)$. In figure (Direction Vector) is shown a vector, $\mathbf{u},$ that has tail at $P$ and arrow end at $Q.$ That vector is expressed not as a point, but still with paired elements as $[Q-P]=(2,4).$ In particular this is called a $\bf \color{red}\text{direction vector}$. Its magnitude is the length of the line segment from $(0,0)$ to $(2,4)$, and its direction is parallel to the line segment between $Q$ and $P$ and, of course, in the direction of the arrow. The concept of a direction vector preserves the magnitude and direction of the vector $\mathbf{u}.$ Also, it can be used to predict a point, such as $Q,$ by adding the direction vector to a chosen starting point, such as $P$.
Home